Work in progress
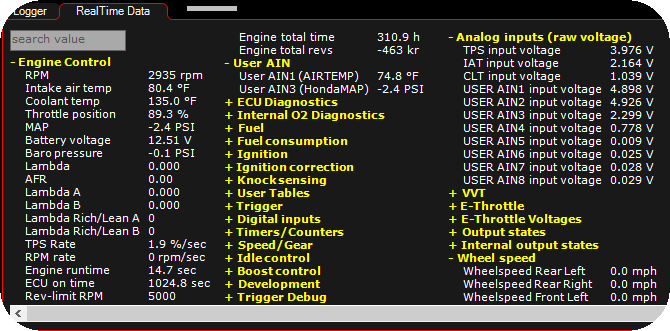
RealTime Data tab showing data values in real time. Click on the yellow category names to expand/hide list of variables.
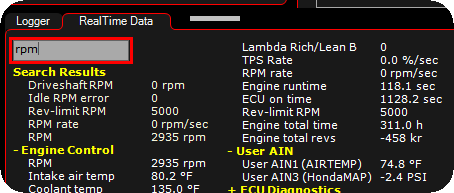
The search input box can be used to easily find the relevant RealTime data values
Note: Most RealTime Data values are self-explanatory, if you dont understand or have questions, contact support.
Engine Control
RPM
Intake air temp
Coolant temp
MAP
Battery voltage
Baro pressure
V1 has an internal BARO sensor, while all other MaxxECUs do sample the MAP-sensor during power up.
Note: At really high altitude differentials, you should consider using an external BARO sensor.
LAMBDA
The average lambda value if using two or more sensors.
AFR
Calculated AFR ratio based on lambda and selected fuel.
Lambda A
Lambda B
Lambda Rich/Lean A
Lambda Rich/Lean B
TPS Rate
RPM rate
Engine run time
Start to increment when engine is started and resets when engine is restarted.
Note: Counter will stop at 3200seconds regardless of longer engine run time.
ECU on time
Start to increment when ECU is started and resets when ECU is rebooted.
Note: Counter will stop at 3200seconds regardless of longer ECU on time.
Rev-limit RPM
The actual RPM limiter value to be used.
FUEL
ADjusted VE
The VE value + enabled user adjustment tables.
fuel cut
How much fuel is MaxxECU cutting at the moment.
fuel cut reason
Explains in short why is MaxxECU cutting fuel.
lambda target error
Lambda target - Measured lambda = Lambda target error.
Total Fueling Target Error
The sum of the Lambda/Lambda Target + Current Lambda correction. A representation of how far off the VE-table is.
Trigger debug
Lasttooth angle
Theoretical length of the last seen tooth, must be logged at very high speed to be accurate.
Lasttooth corr
Last seen tooth time/angle. Should always be stable (but RPM dependent). <-- if not, wrong trigger pattern seen compared to settings.
ignition
Ignition cut
How much ignition is MaxxECU cutting at the moment.
ignition cut reason
Explains in short why is MaxxECU cutting ignition.
User AIN
User AINx, this list will be populated automatic when new sensors are mounted).
User CAN inputs
User CANx, see User CAN inputs.
ECU Diagnostics
5V VRef voltage
Internal 5V regulator, should be close to 5.00V all the time.
CPU temp
Actual CPU temperature
Error code count
Should be "0", otherwise there is a stored error code in the system, see Diagnostics --> error codes.
last error code
Includes the last error code received, used for easy up the task of troubleshooting.
Power on count
Total amount of times the ECU has been started from the production date.
Total on time
Total on time since assembled.
Top ECU temperature
Maximum temperature of ECU since the production time, can't be reset.
Top supply voltage
Maximum top power supply of ECU since the production time, can't be reset.
Output states
X out n
Display the actual duty % ot the output X N.
Example
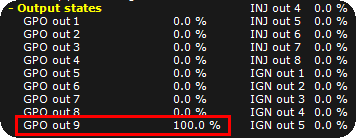
In the above example, GPO 9 is activated with 100% duty = constant ON.
Wheel speed
Note: Requires some wheel speed sensors to be activated on input(s) to be visible.
Wheelspeed front/rear left/righT
Undriven wheels avg speed
Undriven average wheel speed. Calculated from left and right, or whats available as Undriven wheels.
Driven wheels avg speed
Driven average speed. Calculated from left and right, or whats available as Driven wheels.
Wheel slip
Difference in % between Undriven wheels and Driven wheels.
Clutch slip
Automatic calculation of clutch slip based on Engine RPM and Input Shaft RPM input, for auto transmissiones it can also be calculated depending on gear (see settings).
Odometer
Distance counter
Traction Ctrl
Target slip
Target amount of wheel slip in % (between Undriven and Driven wheels)
Power limit
Amount of cut/drop in % MaxxECU is doing for the moment.
MISC
BMW buttons
When using the BMW MS43 OEM CAN protocol, the following values are available in the system to indicate button press in the steering wheel.
BMW steering wheel button |
BMW Buttons (output value) |
Cruise control ON/OFF |
72 |
Cruise control SET |
18 |
Cruise control ACC (+) |
36 |
Cruise control DEC (-) |
128 |
CruiseCtrl Locked speed
The speed that the Cruise control system has as the target speed of the actual control.
CruiseCtrl FilterEd speed
The vehicle speed used by the Cruise control system, this values is filtered a little bit extra to maintain a more stable control.
Analog output 1/2/3
Shows the output voltage the ECU is TRYING to send out, not the actual voltage (which could be wrong if output is short circuited).
Nitrous
Nitrous enabled
Show the overall enable state of the nitrous system.
0 (Disabled); 1 (System enabled, but safety conditions not met,); 2 (Enabled and conditions are met)
Work in progress