Mostly used with servomotors and linear actuators wired to a MaxxECU H-bridge outputs for controlling active aero or similar.
User PID
Description
Name of the PID control output.
control enabled
•disabled
•Enabled, always active
•Enabled, with enable input - With the enable input option, the digital input function User PID X enable control can be used to turn on the PID controller by any desired conditions.
controller settings
process variable
This is the measured process value. For example the position of an actuator.
This is normally an analog input calibrated for 0-100%, but this can be any values in the range of -3200.0 to 3200.0
target value table
The PID target table, with 4D option.
PWM output
pwm frequency
The output PWM frequency.
Solenoid dead time
Specifies the solenoid dead time.
How to set the solenoid dead time
Set this to a pulse width just below where the solenoids begins to flow.
This can be set by testing the solenoids set to a User PWM temporarily, set the frequency you want to use, and increase the duty cycle % to where the solenoid begins to flow. Then set the dead time value to: 10 * startflow% / frequency.
Example: If the frequency is 50Hz and the solenoid begins to flow at 24%: 10* 24 / 50 = 4.8ms, set the dead time around 10% below --> 4.3ms.
min duty
Minimal (limited to specified value) duty to be outputted during activation.
max duty
Maximal (limited to specified value) duty to be outputted during activation.
Note: Negative duty is outputted on the "negative" PWM output. PID controller with just one output uses 0-100% for example, while double-ended controllers can use -100% to 100%.
PID controller settings
PID frequency
The update rate of the PID controller loop.
This can be different from the PWM frequency. It should never be faster than the PWM frequency, but if the PWM frequency is high, it can be slower.
Note: 100-200Hz is good for most controllers.
P gain
Proportional value.
I gain
Integral value.
D gain
Derivative value.
D filter
Selectable D GAIN filter changeable D GAIN depending on speed processing.
see, PID control.
I limiter table enabled
The I-Limiter can be used to limit the integer (I) term to prevent windup, or to allow more aggressive I tuning.
Set the axis to the PID error RT-value, and tune for lower allowed errors with large errors, and larger values close to the target. This helps preventing overshoot, while still allowing the I term to hold the position firmly.
Fee-forward enabled
Feed-forward is used to directly add output duty based on the process input value. For example, can be used to overcome spring-pressure in actuators that returns to zero by the spring force.
Example
Example of controlling an rear spoiler (active aero) using MaxxECU RACE H-bridge outputs.
(in this example, we assume a servomotor is wired to MaxxECU motor outputs and are properly working).
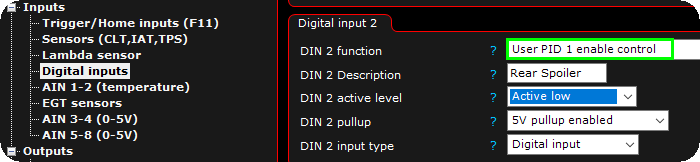
1. Wire a switch to an available input to activate the active aero (of course you can activate this digital input function based on any other value, like vehicle speed, using the internal output system, MDash, or from a CAN keypad).
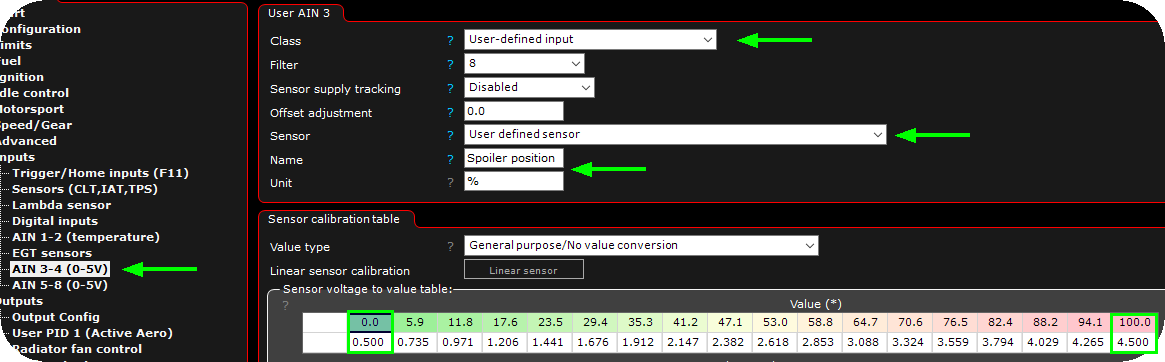
2. A position sensor must be wired and calibrated, in the above example a linear position sensor is used, and calibrated to 0 - 100% position of the rear spoiler based on a voltage curve. Lets say 50% is the horizontal position.

3. Enable the User PID positive and/or the User PID negative.
Note: the User PID function does work on all outputs, but make sure the electrical peripheral wired is matching the MaxxECU electrical output features.
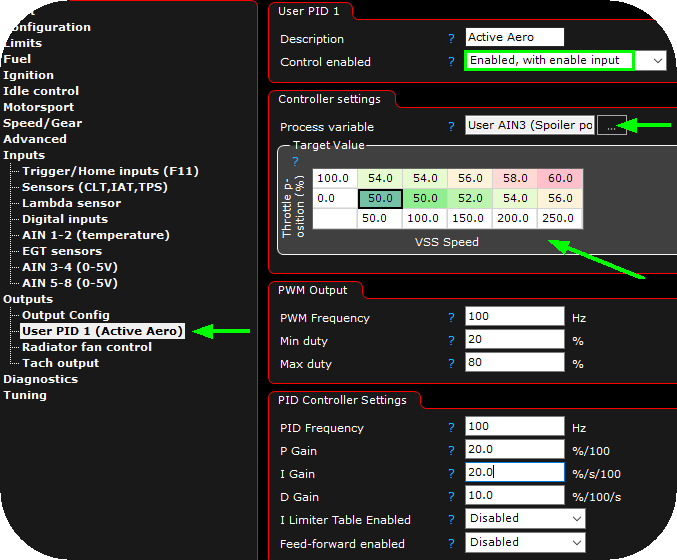
4. In the above example, we want our rear spoiler to move according to the target table (TPS vs Vehicle speed) to move the rear spoiler during higher speed to create more down force.
Note: Before we proceed with testing this in real life, make sure to properly adjust all frequency and PID settings to suit your need to it actually moves like it should.